When Yarbo navigates from point A to B (starting a mowing job, moving between areas, etc.), Yarbo’s navigation puts it on a path that is too close to boundaries of areas and no go zones. As Yarbo reaches these points in the path, it has to stop, adjust, maneuver, sometimes seemingly getting confused as it tries to work around a boundary corner.
When Yarbo maps a path for navigation, if it just gave the unit a bit more buffer on either side, Yarbo would be able to seamlessly move between points.
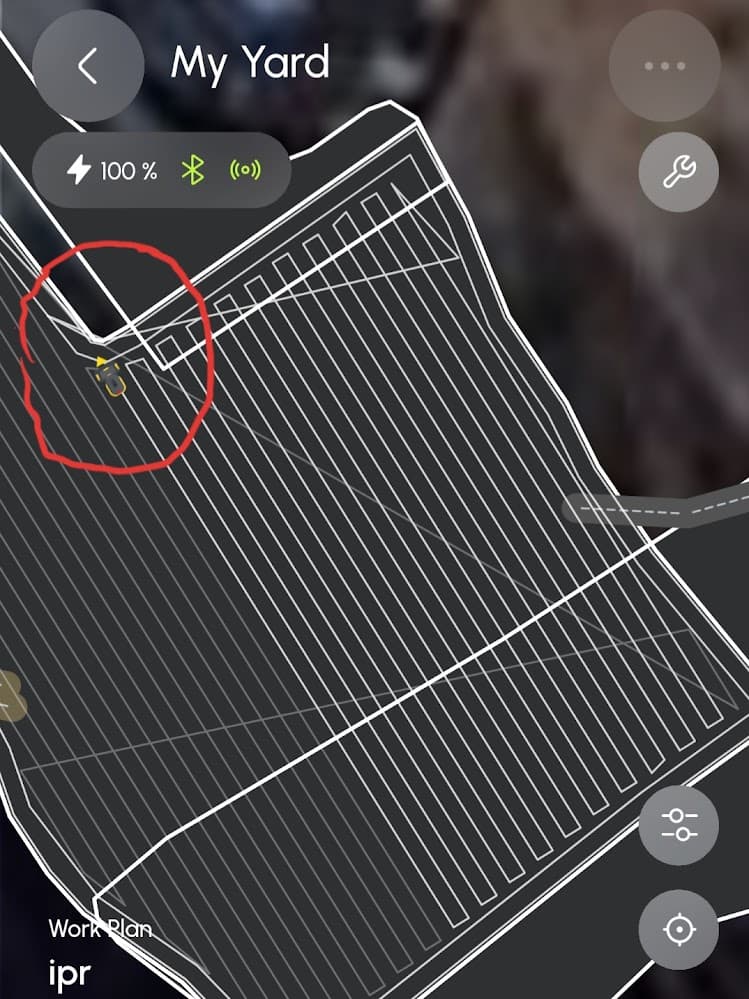
In the image, the green circle is where Yarbo is, the green arrow is where Yarbo needs to go. The two red arrows are boundary corners where Yarbo has to stop and dance around because it gets too close. Note, this is not an obstacle avoidance scenario. Yarbo is just getting too close to the boundary and it halts, then tries to work through the problem. This particular use case was mid-job.
I have a support ticket in progress, but wanted to see if anyone else has this issue or if Yarbo has any insight on the issue. Thanks!
it happens in the current firmware from time to time. Overall hugging the perimeter is just a recipe for problems. I think it should stick to the 2nd perimeter line instead of hugging the boundary line. I mean it already cuts across an area for no good reason, why not just let it do that in general if it’s not going to follow already cut path lines in order to avoid disturbing the nice cut line look.
Thank you for bringing this to our attention, and we apologize for any misunderstanding in your support ticket. We understand that you’re requesting an improvement in route planning, particularly in situations where Yarbo gets too close to boundaries or no-go zones.
We’ve shared your case and feedback with our product team, and they’ve already taken such scenarios into consideration. An optimization is planned for the next version, which will include maintaining at least a 30 cm buffer when planning routes to help avoid these types of issues.
We hope this upcoming update will help resolve the problem and improve your overall experience.
Thank you for reporting this, @jeremyj114. I was collecting evidence, but you beat me to it – good.
In this example the lines Yarbo draws to get from point to point within an Area to start mowing another section can be drawn across border corners. It did hit the fence that’s there, even though it’s outside the border.
I have seen mowing lines drawn within the boundary of a No-go Zone. When Yarbo traverses an Area to a starting point, I have had a line drawn right though a No-go Zone, and I think it did a Gentle Touch of what’s there (not sure on that – the rover did seem startled anyway).
Wow, glad I posted this in the forums. Based on the responses I was getting in my support ticket, I was beginning to think I was doing something wrong.
No you are right, I have the same problem as you. I even had a support “teams call” about that issue and they took note of the problem. Yarbo crosses the boundaries in the green marked areas, problem, there is a metal fence it runs into, sometimes it stops and waits for manual resume.
It goes up, across the whole hill, to the blue marked area, does 2 turns and then goes back down to mow the remaining 3%. It needs to get more efficient in planning, like a little leeway in overlap, or do do some stripes twice to avoid going up and down the hill to do 3m².
I think the problem got worse when they started to include the cameras.
I have a lot of problems with growing plants alongside my boundries that throw yarbo off it’s way.
This problem is currently the only reason I cannot trust Yarbo to go out and mow the lawn unattended. There are a couple narrow areas in my lawn where if it decides to cut a corner too close when navigating around, it can get permanently stuck trying to get around its perceived obstacle and will tear up the lawn.
An upcoming update was mentioned back on April 29th.. has that already been released or is it still in development?
How: I have an Area beyond this one to mow, and to get there the navigation path of the rover brought it to the end of a fence where it hit something, rocked back and forth before it figured out what to do, and/or wore a path with the tracks before moving on to where it needed to mow. I tossed a Stubby Deadend there and put it early in the Work Plan before the Area I wanted mowed. On the way to that Area, the rover now stops to “mow” the Stubby Deadend, and it is drawn away from its old path. There’s another on the way back that forces the rover to use a different path.
This is only one use case for Stubby (or Decoy) Deadends. In a prior Tip post I described how to force the use of different Pathways. I think there are more use cases, even beyond the upcoming firmware change (which will be nice – the rover gets too close to corners and No-go Zones – hopefully that gets corrected). I’m looking at those and will post when I have something fun and interesting for y’all to play with.
@Ken I really appreciate your support and effort here in trying to help everyone and spend so much time finding solutions and work arounds for problems that should not be there in the first place! Yarbo really need to get their stuff together and release bugfix after bugfix. It is simply not our job to find work arounds for those obvious problems, I too have a corner yarbo cuts 100% of the time and quits working, but it is neither my job, nor yours, to work out a solution. It’s yarbos job to deliver a working product, as advertised!
Yes, I have experienced this and to damaging extent. The robot is wider than the line it draws from A to B. In addition to whitnessing your behavior, mine shot a line between two no go zones that did not touch or overlap in the map. I didn’t notice on the preview zoomed out and it busted a cutting disc on concrete.