(Originally posted on the Yarbo Users and Community Facebook Group, June 12, 2025)
Tip: Automated varying of Pathways
whooaaaaa, wait…WUT?
OK, this one’s important – if I’m not delusional and y’all can get it to work, too.
Nobody likes the rover taking the same Pathways all the time, as it wears your grass down. In fact, Yarbo is working on varying Pathways with upcoming code changes.
What if there was a way you could vary your Pathways taken NOW…and have it automated?
What I found is fiddly and takes a little mental coordination but is not hard. I’d appreciate if someone could try this out and let me know how it works for you.
Steps:
-
Create a couple of redundant Pathways that go to/from the same Areas.
-
At the ends of each Pathway, create a short Deadend that starts a tiny bit off the Pathway and ends on the Pathway. To do so:
– Look at your map, drive the rover to an endpoint of Pathway but not quite on it.
– Create Deadend. Start the Deadend just a very short distance from the Pathway’s endpoint on the map (probably a foot or two in real life), and aim the rover directly onto the Pathway, straight
– Drive the rover forward following the Pathway until you see the Next button light up. Your Deadend will be a very short couple of feet.
– Save the Deadend (I left the mowing height and speed at the defaults…yes, the blades will come on when mowing)

(All this exactness may not be needed, but it works, it is easy to comprehend, it looks neat, and if you keep things straight it minimizes impact on the grass.)
-
Edit your Work Plan for a mowing Area that will use the Pathway. (I’ve got at three Work Plans that go in that direction…and now three separate Pathways.)
-
Add that new stubby Deadend to your Work Plan, likely the first entry as you head out to mow if it’s closest to the Docking Station. If you chain Areas and set up multiple Pathways with stubby Deadends in other places, add your stubby Deadends to the Work Plan in the order needed to navigate to and from.
Note: I’m not sure if it works with Smart Sorting. Maybe if all you do is do one of these configurations for when heading out, not back? I don’t usually use Smart Sorting.
-
Run the Work Plan. Cross your fingers.
-
Optionally repeat for the return trip by creating Deadends that put the rover onto the Pathways you want and picking one of the Deadends to be at/near the end of the Work Plan.
What happens? The rover heads to the first item in the Work Plan, the Deadend at the endpoint of a Pathway. The rover mows that tiny stub of a Deadend, and then continues straight along the Pathway it’s next to.
Wut? Yeah, I was surprised – the rover FOUGHT ME with everything else I tried and always took Path 3 in the picture. EVERY TIME. I was able to change the behavior this time using stubby Deadends.
So what about when the rover comes back to charge? If you do nothing, I’ve seen it take that Pathway it took out – it must be how Yarbo’s navigation works. If you want it to take a different Pathway, do the same thing, only from the other end (DE1, DE2), adding those Deadends to the end of the Work Plan.
So…how do you actually vary this? It’s all in the Work Plans. You can create multiple Work Plans for the same Area and vary the stubby Deadends you put onto those Work Plans, then Schedule them on different days. Or, if you’re like me, you have a few Areas you mow separately that are beyond those Pathways. Using this technique, each Work Plan can have its own navigation path, defined by you and your stubby Deadends and multiple Pathways.
Example picture:
- The docking station is way on the right
- There are several Mowing Areas heading off to the top left
- The rover comes toward DE3/4/5 to get to those Mowing Areas
- The Work Plan for MowingAreaX lists DE5 as the first thing
- The middle of the Work Plan is the same as before
- DE2 is then added as the last thing on the Work Plan
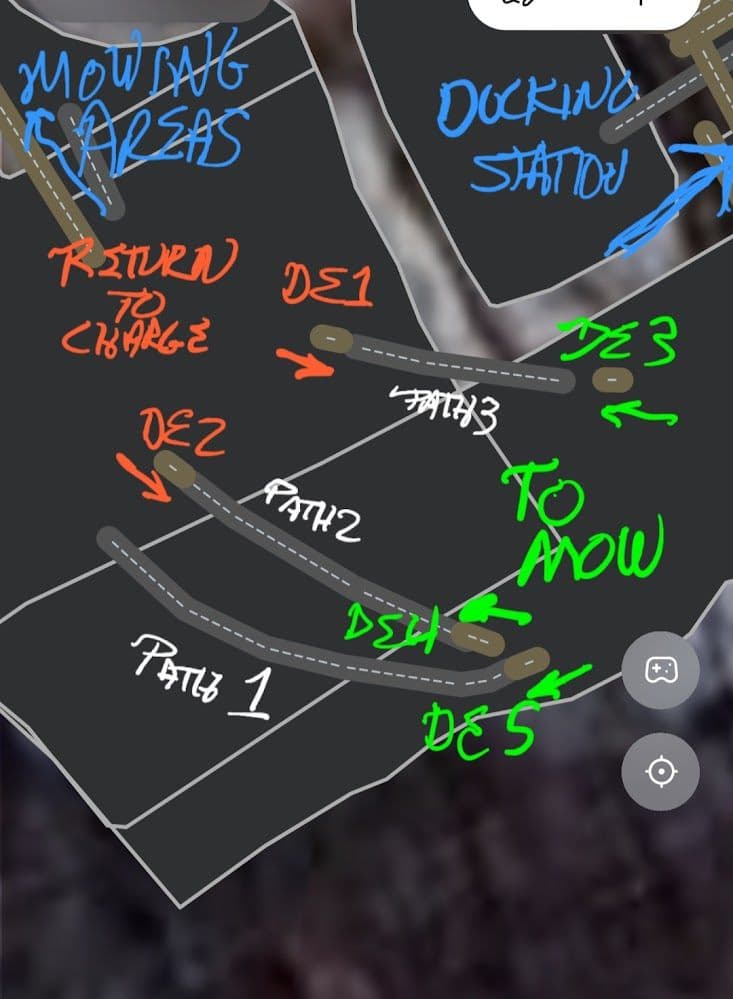
The rover heads out to MowingAreaX, “mows” DE5, continues along Path1 and goes and mows MowingAreaX. On return, the rover “mows” DE2, uses Path2, heads back to recharge.
Another Work Plan is created for MowingAreaY which is beyond MowingAreaX. That Work Plan now has DE4 to head out, DE1 to head back to charge.
And so on.
To keep it simpler, if you don’t do a “return” Deadend, I believe it takes the same Pathway that it took before to head out, so you may not even want to bother with the “return” Deadends (DE1, DE2), just have different Work Plans select different Deadends heading out (DE3/4/5).
And, yeah DE3 is one of my first tries and a bit off the Pathway. I think it still works.
Align these stubby Deadends and Pathways with where your rover’s coming from to limit turns and the impact on the grass. Keep 'em straight so there are no turns needed to get to the start of the Deadends, and keep your Deadend aimed straight onto the Pathways.
OK, have at it. I’ve had only MINIMAL testing on this, and there are combinations that I’ve had NOT WORK, but what I boiled it down to here has worked for some basic test cases.
Fingers crossed this actually works for everyone. Let me know!
I hope I’m not eating crow and deleting this as bogus in an hour or two after folks give it a try and laugh at my silliness…ugh…
