A little thread for those who want to share advices on how they get the best results from their mower. I’m quite satisfied with the results I get, but I had to try several things (and destroy quite a bit of lawn) before finding a solution that works. So here are some advices:
If you can, docking station on concrete/asphalt or anything that is not grass.
If you can, have your areas overlap around the perimeter an area it can’t destroy such as an asphalt entryway, concrete pathway.
If 2) is possible for you, make your pathways finish in that area. Yarbo has a tendency (that we all hope will be cured some day) to do zero-turns at start and end of pathways. If you can start and end pathways on areas that are not land, this helps protect against those unwanted zero-turns;
When you can’t make your pathways start/finish on such areas, make sure that the start and end are not too close of the edge to reduce the odds that Yarbo decides to do a dreaded zero-turn (at least in my situation, I noticed that if the pathways is far from the perimeter, zero-turns occur less frequently).
When mowing, increase as much variation as you can. This can be done by using parallel mode and selecting a rotation for each mow.
Personally, I do not recommend checkboard because it is only 2 variations. If you mow often, you’ll start to see tracks, the start and end point of the mow will be evident and the turns will occur almost always at the same place. If you use parallel and vary by 10-30 degrees for each mow, then you spread the turn points.
Don’t mow on wet ground. Don’t.
If your grass is dry but you have doubts if the ground below it is still too wet, use spiral mode. This is not as beautiful as those nice parallel lines, but still esthetic and it will protect your grass much better than parallel where you might end up with a few too many unwanted zero-turns or tight turns that may tear a bit the grass.
For areas with high frequency mows (say every day or every other day), add in the routine a spiral mow (especially if you want to decrease the height of the grass compared to usual). Again, spiral mode is easier un the grass and if you want to mow while giving a “break” to some pressure areas, I find spiral mode to be very helpful.
When using spiral mode, there are very few zero-turns except in very very tight areas (such as a small corner or areas where 3 point turns are impossible). Either you accept destruction there, or you add a no-go zone that you activate once in a while for an occasional mow or for manual mow). I was able to setup my areas so in my 3 acres of mapped areas I only have 2 zones like this where I’m 100% sure there will be an unwanted destructive zero-turn 100% of the time…
If you have missed spots you can: a) increase the overlap; 2) slow down mowing speed; 3) be patient, rotate and it’ll get there; 4) Complain, but this won’t help…
If you have a lot of trees (in my case > 100); no-go zones are not helping. They make things worse (the robot tries to go around all of them in inefficient ways or makes zero-turns or a lot of other crazy things like this). I suggest to mow using Moderate Bypass. I disagree with some that the vision is that bad. At least around trees it is quite good. Yes it will miss a zone behind the tree of about 30-50cm, but the next mow it will be caught.
Don’t let your grass grow too long as it can mess with vision.
If you need to mow with tall grass: 1) Make sure it is dry; 2) Use gentle-contact
Again, if tall, I found that it is not true that raising the blades help. Put them at around 6cm, module gap set at “loose”. And remove your guards.. Else you’ll end up unclogging your thing all the time.
Remove your guards. Seriously it helps.
This one may not be for everyone, but vary your pathways if you can’t make them on concrete, asphalt or hard ground… Every week I change slightly the pathways that start and finish on grass, mainly between areas. Takes me about 10 minutes (I only have to redraw 3, the rest are either hidden or I don’t care), much faster than mowing the whole thing and it helps not having tracks around pathways (and in fact when you do that you don’t even see them anymore).
Hide as many pathways as you can behind garages, threes, bushes…
For areas you know are weak GPS spots, make sure that the robot will see the sky rapidly after entering those zone. I do that by either activating a NGZ when the orientation of the mow will make that zone be too long in this area, or by increasing the speed of mow.
I have one area with weak GPS that was very problematic. I “solved it” by drawing a NGZ around it, and then starting a deadend in an area close by with good GPS and then draw that deadend to go into that weak zone and finish again in an area with good GPS, setting the speed at high… It works for this situation as it is close to the edge, can have a straight lines and I have strong GPS at start and finish… May be a “trick” to try if need be?
Regarding the blades, check them once in a while (I do it once a week) to clean them a bit. But since I mow often and the grass is not very long anymore, I have no problem with them being able to cut, but a 2-3 minutes clean every week seems to help with the cut quality (that is quite good in my case).
Keep asking @Yarbo-Forum to remove zero-turns. If we all ask them they might consider it one day…
Keep asking @Yarbo-Forum to be able to manage pathways like they should be (corridor width, randomization, routing optimization). There is no way we can solve the pathway problem without that.
2a - If you’re overlapping a driveway so that the turns will take place on it, don’t forget to add a no-go on that driveway that you will turn ON if a car is present. And one for the trash bins at the end of the week.
26 - Don’t try to be accurate when mowing or dead-ending alongside a building, wall, or fence. Stay away by at least half a yarbo width on nice ground, and stay away at least a full yarbo width on a slope. Yarbo has a loooong body. The closer it gets alongside a wall, the less it can turn. And in reverse, it’ll climb and can wreck your antennas.
23a - Pathways are great for the S1. They’re mostly useless for overlaps with the M1, and blower, and marginally useful for the SAM. I’d strongly urge this solution instead. I apologize if it’s hard to follow, but it solves most problems for both users AND for Yarbo’s coding team. Write this, once, and the issue is done. It resolves all of the workarounds wanted by me, Ken, I hope even you, and pretty much anyone else who deals with overlaps. It can reuse almost all of the existing code that the solver uses for pathing. Too much effort is wasted trying to kludge pathways, which are rarely appropriate for overlaps.
Thank you so much for taking the time to share your detailed experience using Yarbo. Your insights and suggestions are incredibly valuable, and many of the tips you mentioned address the exact concerns we’ve heard from other users as well.
We truly appreciate your input. As for the two key issues you highlighted, I’ll make sure to bring them up again with our product team for further review and discussion.
Wishing you all the best with your Yarbo experience, and please don’t hesitate to share more thoughts with us in the future!
Are you telling me that if you draw a pathway across several zones that it will « step out » of the pathway at areas that are not the start and end of it is on an overlapped area???
If yes, I need to try this! Will it also enter the pathway somewhere along the pathway or entering is only start and end? And will it use it to recharge also? Does it enter and exist always at the same spot? Again if this is confirmed that would be a game changer!
A word about vision: Not sure about that one. I prefer it on. Yarbo was able to avoid me while I was on my John Deer (did not see it coming but it went around me… Almost destroyed 7K$ worth of robot! It would have lost against my tractor…) And It gets much closer to obstacles with vision on and no no-go zones… I really use NGZ only around my lake, my Garage and shed (so it doesn’t enter it when the door is open!), my few gardens (they have no borders and I would be affraid Yarbo confounds the yummy lettuce/basil/minth etc as long grass), the septic fossa covers (they are slightly elevated, sometimes Yarbo sees them, sometimes not, but when it doesn’t see them, because I mow low, the blades hit the concrete…), the fire pit (obviously!) ans some holes… The NGZ are for temporary events mostly (RV, car, teens that throw in a party and left a crap load of stuff on the ground… etc).
Well, it can be, but it can be useful while we wait for them to fix the poor routing and pathway management… I have a few ideas… But if as you say it is not consistent, it might be more of a problem than help…
Again, this morning I had a situation where Yarbo was 10m from the dock and decided to go around about half the property to go charge… It was on an overlapping area, chose the area it was not mowing on, and started chaining the areas and pathway to go all around the property to come back to the charging dock…
For me, I watched it pivot through a pathway at the center that went through one fence gate of a double fence gate. If the second gate was closed and the angle it came at it was just right, it would have collided with the second gate. I’ve also had my mower on my driveway which has a pathway that goes across it to connect two mowing areas. Since the driveway was a mapped area I hit start and it drove down my driveway and entered that pathway dead center. It shouldn’t have done that. From my perspective there was no path to get there from my driveway. I noticed this because I had a snow blower pathway that went through my single gate to my driveway. I hit start to mow one of the areas beside the driveway one day and instead of taking the pathways between the grass areas it decided to take this pathway and that gate was closed. This was before obstacle avoidance existed for pathways. It would have ran right into the fence and everything on my patio if I wasn’t there to stop it. I deleted that pathway. Odd thing is that it wasn’t doing that and then one day randomly decided to do it. I even stopped the plan, put it closer to the area it needed to work, hit start, and it went back to get onto that pathway anyways. Pathways have a defined entrance and exit. That is their purpose. It should at least be a toggle or something to enable it to ignore that base function if within an area.
My neighbor has a septic vent that might have been run over by a Cub Cadet one too many times, and is like that. I ended up driving in some short pex segments around it and Yarbo seems to avoid it now. I also left enough above ground that they’ll trigger the bumper.
Granted, now you’d have a couple (white? blue? red?) sticks around it, but… meh, for me, it’s a neighbor and he can suck it up.
I drew two small NGZ… just need to cut the small strip of lawn around it once in a while. But I made the NGZ small enough that it is barely noticeable… I do some variations of what has been said before. I first draw the NGZ. Then I put a smaller NGZ template on top of it and delete the one I drew. It makes the mordre tighter. But this work only with squares/rectangles or rounds…
For #24, can you share a picture of your shrub and just scribble on it what is expected? I’m trying to imagine this in my head but I need that “ah ha” moment!
I use a rubber anti fatigue mat with holes in it for my driveway to the charger. Saves the treads on Yarbo, allows grass to grow up through it. Doesn’t tear up the yard…May do something similar on one end of my pathways.
Neighbor has some shrubs and brush that, if we trim them to be safe for the antennas to pass under, it’d be naked. But there is a nice gap between them and the ground. It just isn’t as tall as the antennas.
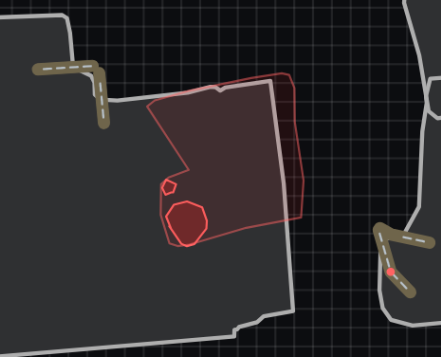
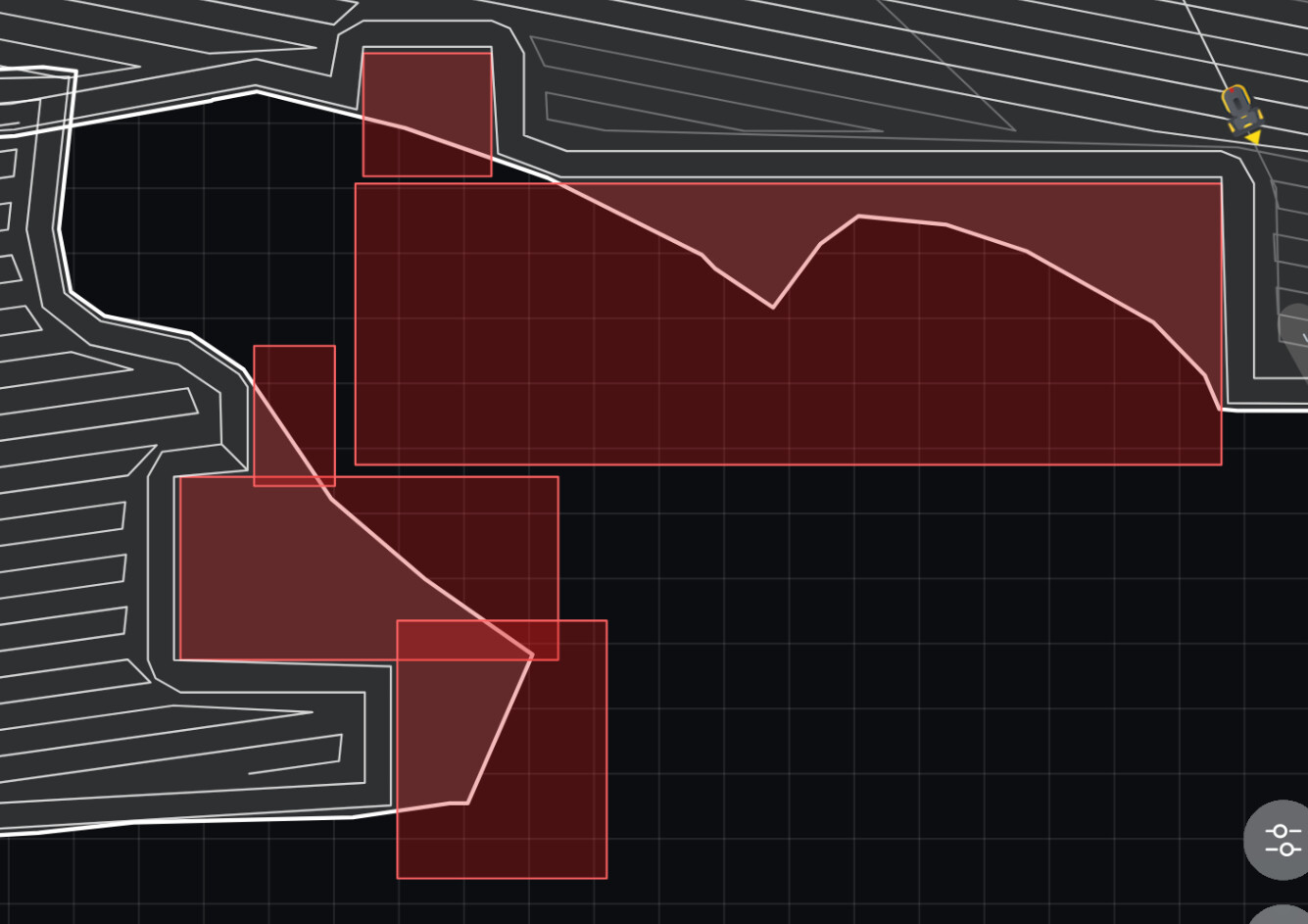
Since the Yarbo is so long, it can drive straight in and easily wedge the M1 in there, leaving the antennas just out of reach of certain doom.
The map above shows four dead-ends managing a corner that another neighbor (next door to the yarbo area) simply never mows, because I guess he likes having skin on his arms or some lame excuse. I have Yarbo peek it’s head in there to take care of it for him. The idea also works with things like parked RVs and snowmobile trailers that have grass happily growing under them (at least along edges), but are too low for Yarbo’s antennas to fit under.